理一理矩阵的知识。The Art of Linear Algebra 对线性代数的知识做了很多很直观的图表,本文中图片全部基于它们(有修改)。
矩阵类型
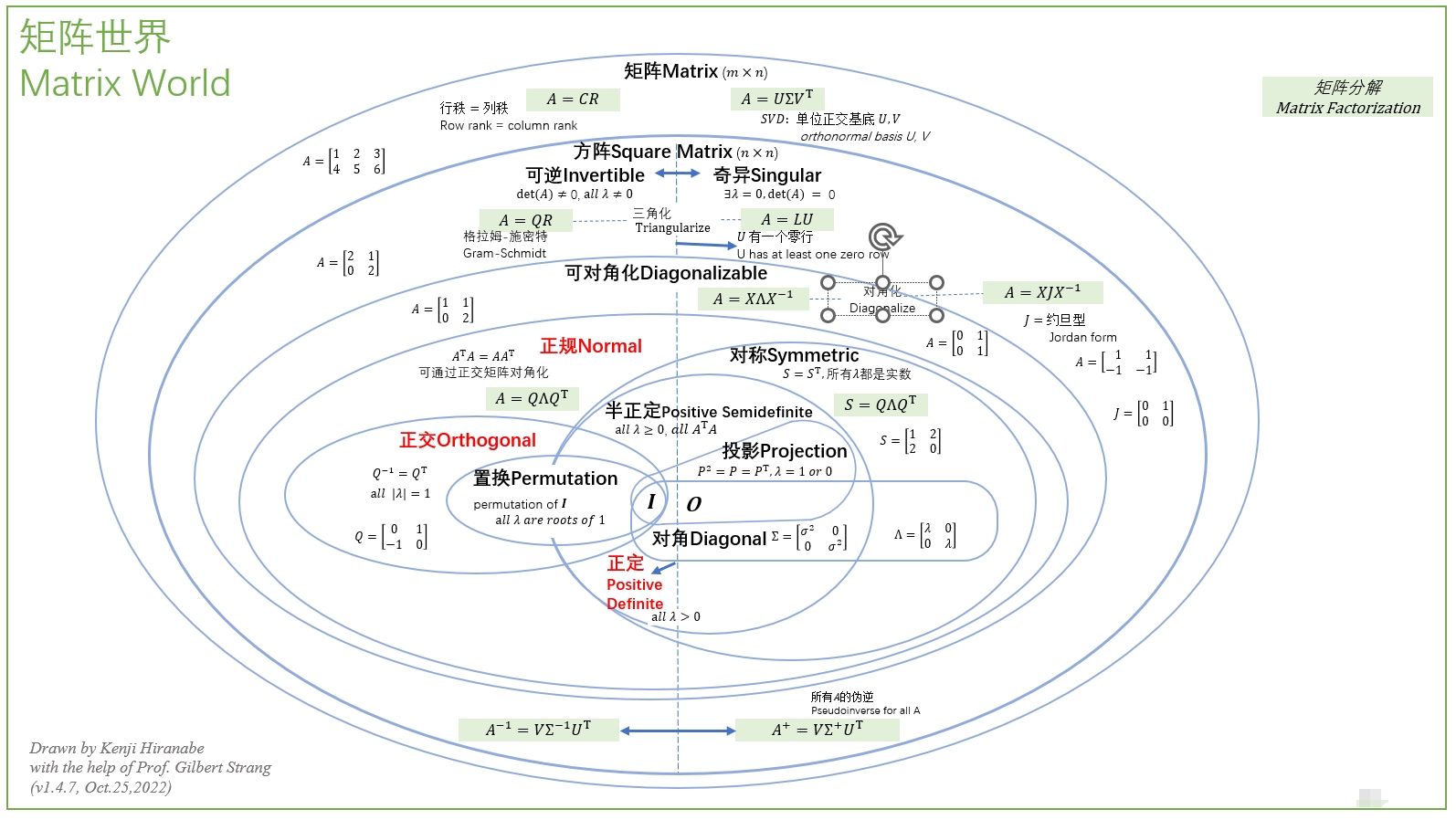
矩阵有很多类别:对称矩阵、正交矩阵、奇异矩阵、可逆矩阵、方形矩阵、可对角矩阵等等。
| 类别 | 描述 | 英文注解 |
|---|---|---|
| 矩阵 (Matrix) | 所有矩阵A \in \mathbb{R}^{m \times n} 均可进行 QR 分解或 SVD 分解。 | MatricesA \in \mathbb{R}^{m \times n} can be decomposed using QR or SVD. |
| 方阵 (Square Matrix) | 方阵A \in \mathbb{R}^{n \times n} 包括可逆矩阵或奇异矩阵。 | Square matricesA \in \mathbb{R}^{n \times n} can be invertible or singular. |
| 可逆矩阵 (Invertible Matrix) | 可逆矩阵A^{-1} 存在,当且仅当 \det(A) \neq 0。 | An invertible matrixA^{-1} exists if and only if \det(A) \neq 0. |
| 奇异矩阵 (Singular Matrix) | 奇异矩阵A^{-1} 不存在,且 \det(A) = 0。 | A singular matrixA^{-1} does not exist, and \det(A) = 0. |
| 可对角化矩阵 (Diagonalizable Matrix) | 如果方阵A 有 n 个线性无关的特征向量,则它是可对角化的,可以表示为 A = X \Lambda X^{-1}。 | If a square matrixA has n linearly independent eigenvectors, it is diagonalizable and can be written as A = X \Lambda X^{-1}. |
| 正规矩阵 (Normal Matrix) | 满足A^T A = A A^T,可以通过正交矩阵对角化为 A = Q \Lambda Q^{-1}。 | SatisfiesA^T A = A A^T, and can be diagonalized by an orthogonal matrix as A = Q \Lambda Q^{-1}. |
| 对称矩阵 (Symmetric Matrix) | 对称矩阵A = A^T 是正规矩阵的子集,特征值为实数。 | A symmetric matrixA = A^T is a subset of normal matrices, with real eigenvalues. |
| 正定矩阵 (Positive Definite Matrix) | 正定矩阵的所有特征值\lambda > 0。 | The eigenvalues of a positive definite matrix satisfy\lambda > 0. |
| 正半定矩阵 (Positive Semi-Definite Matrix) | 正半定矩阵的所有特征值\lambda \geq 0。 | The eigenvalues of a positive semi-definite matrix satisfy\lambda \geq 0. |
| 投影矩阵 (Projection Matrix) | 投影矩阵P 满足 P^2 = P = P^T,特征值为 0 或 1。 | A projection matrixP satisfies P^2 = P = P^T, and its eigenvalues are 0 or 1. |
| 正交矩阵 (Orthogonal Matrix) | 正交矩阵A^{-1} = A^T,特征值的模长为 1。 | An orthogonal matrix satisfiesA^{-1} = A^T, with eigenvalues of modulus 1. |
| 置换矩阵 (Permutation Matrix) | 置换矩阵P是正交矩阵的子集,是通过重新排列单位矩阵的行或列生成的,且满足 P^{-1} = P^T。 | A permutation matrixP is generated by rearranging the rows or columns of the identity matrix, and satisfies P^{-1} = P^T. |
| 反射矩阵 (Reflection Matrix) | 反射矩阵是正交矩阵的一个子集,特征值为1 或 -1。 | A reflection matrix is a subset of orthogonal matrices, with eigenvalues of1 or -1. |
| 伪逆矩阵 (Pseudo-Inverse Matrix) | 伪逆矩阵A^+ 可以通过奇异值分解表示为 A^+ = V \Sigma^+ U^T,即使 A 不是可逆矩阵。 | The pseudo-inverseA^+ can be represented via singular value decomposition as A^+ = V \Sigma^+ U^T, even if A is not invertible. |
复数域
| 矩阵类型 | 复数域上的矩阵 | 实数域上的对应矩阵 | 描述 |
|---|---|---|---|
| 厄米矩阵 (Hermitian Matrix) | 厄米矩阵 A = A^\dagger | 对称矩阵 A = A^T | 复数域中,矩阵的共轭转置等于自身;实数域中,转置等于自身。 |
| 酉矩阵 (Unitary Matrix) | 酉矩阵 U^\dagger U = U U^\dagger = I | 正交矩阵 O^T O = O O^T = I | 复数域中保持内积,实数域中保持正交性。 |
| 正定矩阵 (Positive Definite Matrix) | 正定厄米矩阵 z^* A z > 0 | 正定对称矩阵 x^T A x > 0 | 复数域对复向量的二次型为正,实数域对实向量的二次型为正。 |
| 反厄米矩阵 (Skew-Hermitian Matrix) | 反厄米矩阵 A^\dagger = -A | 反对称矩阵 A^T = -A | 复数域中,矩阵的共轭转置为负;实数域中,转置为负。 |
| 幺模矩阵 (Unimodular Matrix) | 幺模矩阵 det(A) = 1 | 幺模矩阵 det(A) = 1 | 行列式绝对值为 1,复数域允许复数行列式,实数域行列式为 1 或 -1。 |
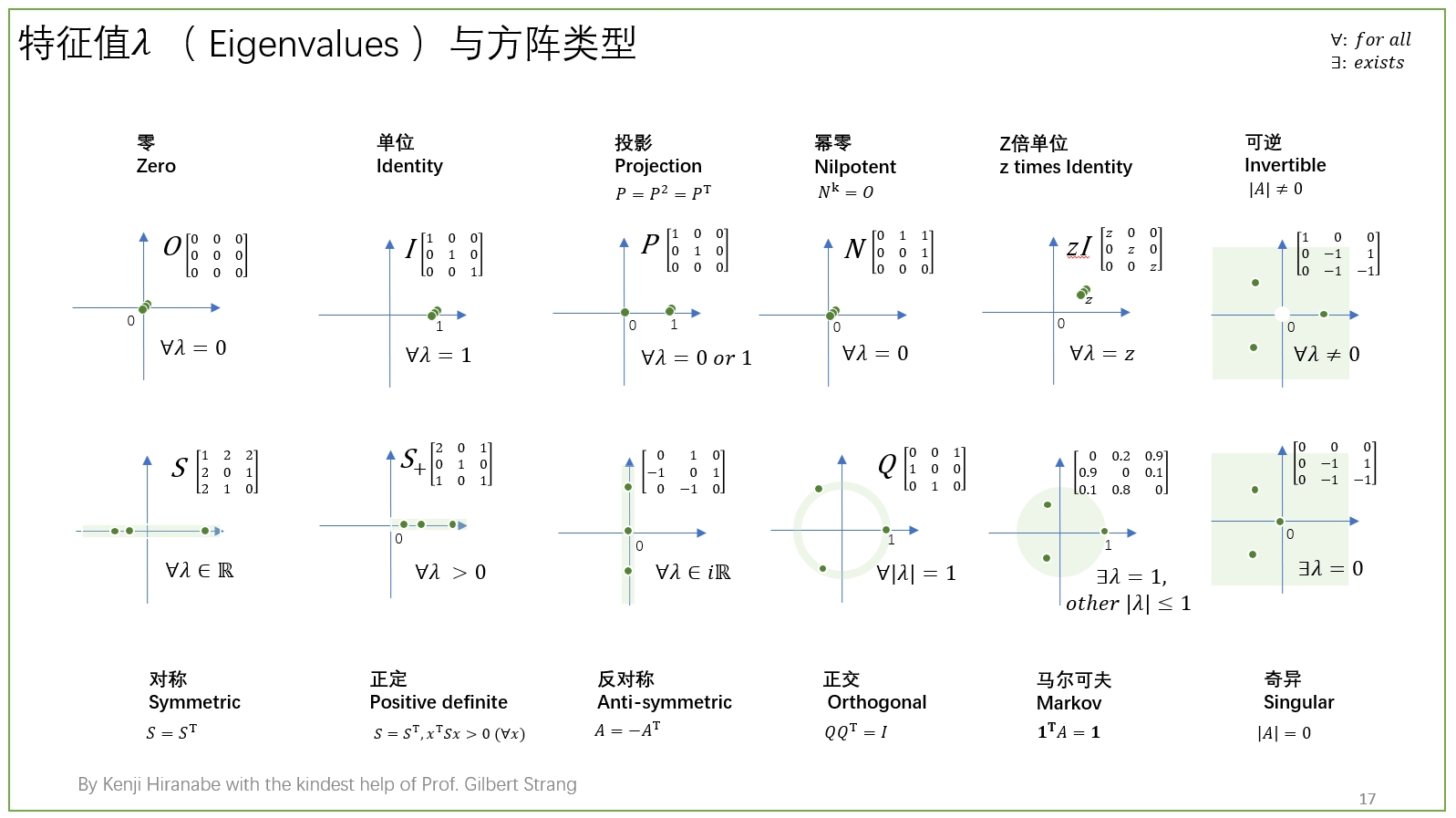
特征值
特征值(Eigenvalue)是一个与线性变换密切相关的重要概念。给定一个方阵 A \in \mathbb{R}^{n \times n},特征值描述了矩阵作用在某些特殊向量(即特征向量)上时,仅改变这些向量长度而不改变方向的情况。
特征值的定义
对于一个方阵 A,如果存在一个非零向量 v \in \mathbb{R}^n 和一个标量 \lambda,使得:
那么 \lambda 就被称为矩阵 A 的特征值,而 v 被称为与特征值 \lambda 对应的特征向量。
几何意义
特征值在矩阵的几何变换中的物理意义。
考虑一个矩阵 A 作用在空间中的向量 v 上:
- 如果 \lambda > 1,说明矩阵 A 对向量 v 进行了拉伸。
- 如果 0 < \lambda < 1,则矩阵 A 对向量 v 进行了压缩。
- 如果 \lambda = 1,向量 v 在矩阵 A 作用下保持不变。
- 如果 \lambda = -1,则矩阵 A 将向量 v 的方向反转。
- 如果 \lambda = 0,则矩阵 A 将向量 v 压缩为零向量。
特征值性质
- 数量:一个 n \times n 的方阵 A 通常有 n 个特征值(包括复数特征值和重数)。
- 重数:
- 代数重数:特征值在特征多项式中作为根的重数。
- 几何重数:与特征值对应的线性无关特征向量的数量,即特征空间的维数。
- 迹和行列式:
- 一个矩阵的迹是其所有特征值之和,即 \text{tr}(A) = \sum_{i=1}^{n} \lambda_i。
- 一个矩阵的行列式是其所有特征值的乘积,即 \det(A) = \prod_{i=1}^{n} \lambda_i。
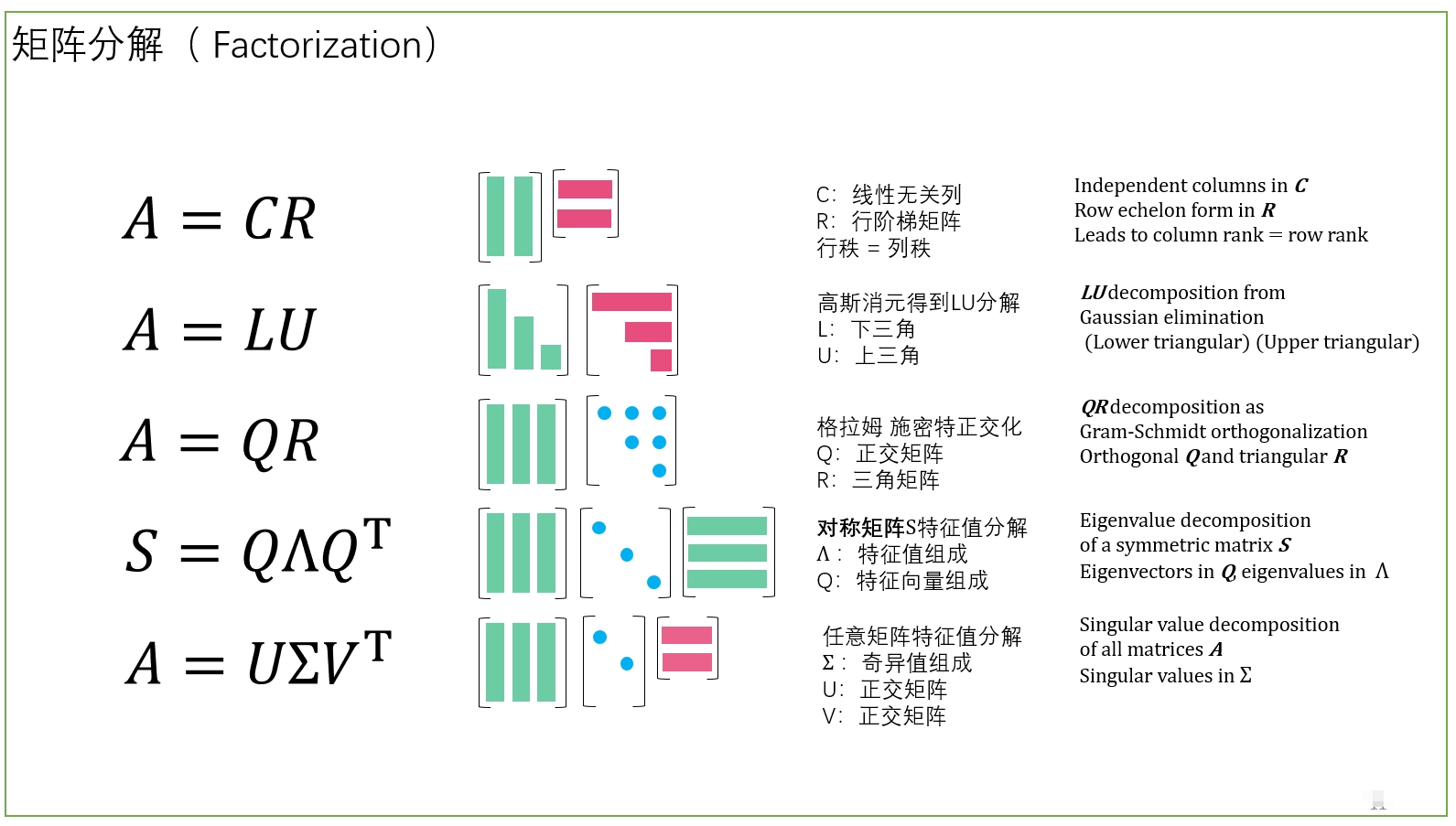
矩阵分解
好端端的矩阵为什么要分解??
求解线性方程组
对于线性方程组 Ax = b,直接使用矩阵 A 的逆矩阵 A^{-1} 来求解,即 x = A^{-1}b,就可以了。但为什么在实际应用中,直接用矩阵的逆来解方程并不常见??
原因:
- 计算复杂度高:直接求逆矩阵的计算复杂度较高,尤其对于大规模矩阵,求逆操作的计算开销可能非常大。
- 数值不稳定性:求逆操作容易引入数值误差,尤其是当矩阵接近奇异时,逆矩阵的数值误差会非常明显。
- 效率低:相比于 LU 分解、QR 分解或 Cholesky 分解,直接求逆非常低效。通过分解矩阵,可利用三角矩阵的快速求解方法。
LU分解
LU 分解将矩阵 A 分解为下三角矩阵 L 和上三角矩阵 U,即 A = LU。这样可以将原方程 Ax = b 转化为两个更容易求解的三角方程:
优点:
- 下三角和上三角矩阵的方程组可以通过前代和回代方法快速求解
- 如果需要针对不同的右边向量 b 求解多个方程组 Ax = b,只需要对矩阵 A 做一次 LU 分解
QR分解
QR 分解将矩阵 A 分解为正交矩阵 Q 和上三角矩阵 R,即 A = QR。这样可以将原方程 Ax = b 转化为:
通过乘以 Q^T,将方程变为 Rx = Q^T b,即:
由于 R 是上三角矩阵,使用回代法可以快速求解 x。
优点:
- 稳定性高:QR 分解在数值计算中比 LU 分解更稳定,尤其在处理病态矩阵(即条件数很大的矩阵)时,它能够更好地避免误差的积累。
- 最小二乘法:QR 分解特别适合用于求解过定方程组(即方程的数量多于未知数的情况),这种情况下可以通过最小二乘法来求解,而 QR 分解是最常用的最小二乘法工具之一。
降维与压缩
在数据降维和压缩领域。通过矩阵分解技术,可以有效地减少数据的维度或存储空间,同时保留大部分信息。
奇异值分解 (SVD):
SVD 将矩阵 A \in \mathbb{R}^{m \times n} 分解为三个矩阵的乘积:
其中:
- U 是 m \times m 的正交矩阵,表示左奇异向量。
- \Sigma 是 m \times n 的对角矩阵,包含矩阵的奇异值(按大小排序)。
- V^T 是 n \times n 的正交矩阵,表示右奇异向量。
通过 SVD 分解矩阵,奇异值矩阵 \Sigma 的对角元素(奇异值)按大小递减排列。较大的奇异值对应了数据中的重要信息,而较小的奇异值对应了噪声或冗余信息。通过截断较小的奇异值,可以减少矩阵的维度,但保留大部分原始数据的结构。
如果只保留前 k 个最大的奇异值和对应的奇异向量,得到的矩阵 A_k 是原矩阵的低秩近似(降维):
其中 U_k 和 V_k 只保留前 k 列,\Sigma_k 是前 k 个奇异值构成的对角矩阵。
矩阵
Matrix 中文翻译成矩阵,日文翻译为行列(ぎょうれつ,gyōretsu),而 Determinant 在中文和日文中都是行列式。
Vector 在中文中翻译比较乱:
- 数学:向量。向 表示方向;量 表示大小和数量
- 物理:矢量。矢 表示箭头,暗示方向;量 表示大小和数量。
- C++:动态数组
矩阵定义
一个 m \times n 的矩阵 A 是一个包含 m 行 n 列的二维数组,可以表示为:
其中,a_{ij} 表示矩阵 A 的第 i 行、第 j 列的元素。A 的维度或大小为 m \times n。
向量定义
向量可用列向量或行向量。但是 列向量更为常见:
列向量相对于行向量的好处:
- 线性代数的标准惯例:列向量是线性代数中的标准表示法,符合大多数教材和学术文献的习惯。
- 矩阵运算的兼容性:在矩阵乘法中,矩阵通常是左乘列向量的,这使得矩阵运算更方便和直观。
- 线性变换的表示:线性变换通常用矩阵作用在列向量上,列向量更符合这种变换的顺序。
- 向量空间的表示:向量空间的基向量通常按列排列,列向量有助于更清晰地表达向量的线性组合。
视角!!
The Art of Linear Algebra 很大篇幅在以不同视角可视化矩阵的运算。
1个 (mxn) 的矩阵,可以视为:
- 1个矩阵
- mn个数
- n个列
- m个行
1个向量通常用列向量表示,行向量可以用列向量的转置表示。
对于乘法,可以结合多视角看待:
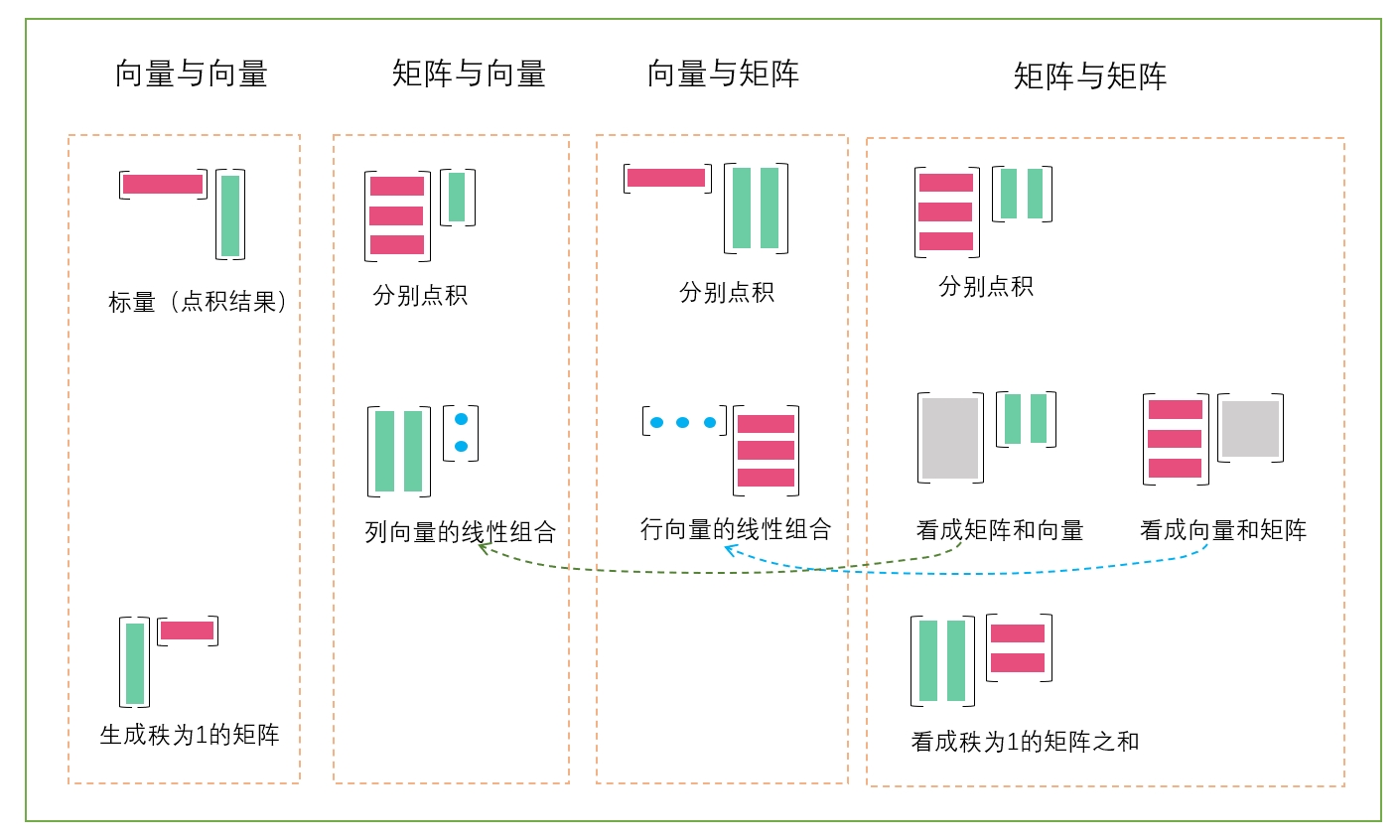
基本运算
- 矩阵加法 (Matrix Addition):两个相同大小矩阵的元素对应相加。
- 矩阵乘法 (Matrix Multiplication):两个矩阵相乘,按行列对应的内积计算。
- 标量乘法 (Scalar Multiplication):矩阵的每个元素乘以一个标量。
- 矩阵转置 (Matrix Transposition):将矩阵的行和列互换。
- 矩阵的逆 (Matrix Inversion):对于可逆矩阵 A,找到 A^{-1},使得 A \times A^{-1} = I。
- 迹 (Trace):方阵主对角线元素的和。
- 行列式 (Determinant):方阵的一个标量值,用于判断矩阵是否可逆。【行列式是一个值】
复数域矩阵
在复数域,矩阵有如下运算:
- 共轭操作(Conjugation):将每个元素替换为其复共轭。
- 共轭转置(Conjugate Transpose / Hermitian Transpose):先对矩阵进行转置,然后对每个元素取复共轭
| 操作 | 复数域 | 实数域 |
|---|---|---|
| 复共轭 (Conjugation) | 对矩阵元素取复数共轭 \overline{A} | 无此操作 |
| 共轭转置 (Conjugate Transpose) | 共轭转置 A^\dagger = (\overline{A})^T | 退化为普通转置 A^T |
| 特征值和特征向量 (Eigenvalues and Eigenvectors) | 允许复数特征值和复数特征向量 | 特征值可能是复数,但特征向量是实数的线性组合 |
| 对角化 (Diagonalization) | 所有矩阵都可以在复数域上对角化或化成约当标准形 | 不是所有矩阵都可对角化 |
| 旋转和相位 (Rotation and Phase) | 支持复数相位旋转 e^{i\theta} | 仅支持实数旋转 |
参考
- https://github.com/kenjihiranabe/The-Art-of-Linear-Algebra
- https://en.wikipedia.org/wiki/Matrix_(mathematics)
- https://github.com/Visualize-ML/Book4_Power-of-Matrix