步进电机是一种能够将电脉冲信号转换为精确角位移的电机。有三类:
- 永磁步进电机(Permanent Magnet Stepper Motor):使用永久磁铁作为转子。扭矩较大,适合低速应用。
- 可变磁阻步进电机(Variable Reluctance Stepper Motor):转子由软铁材料制成,没有永磁体。结构简单,成本低。
- 混合式步进电机(Hybrid Synchronous Stepper Motor):结合永磁和可变磁阻的优点。提供高精度和高扭矩,是最常用的类型。
以下主要关注混合式步进电机。
混合式步进电机
结构:
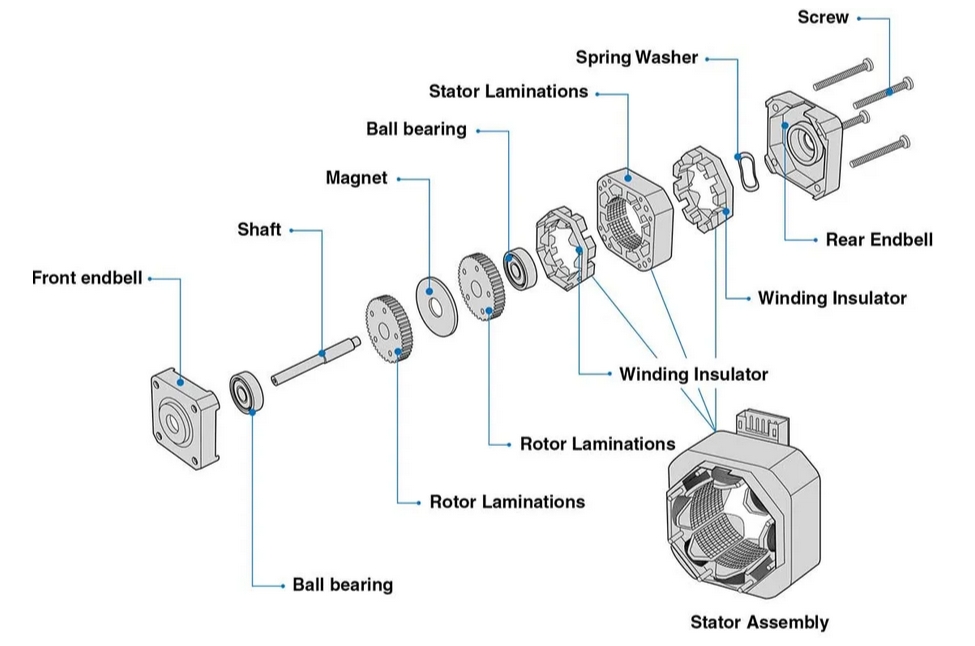
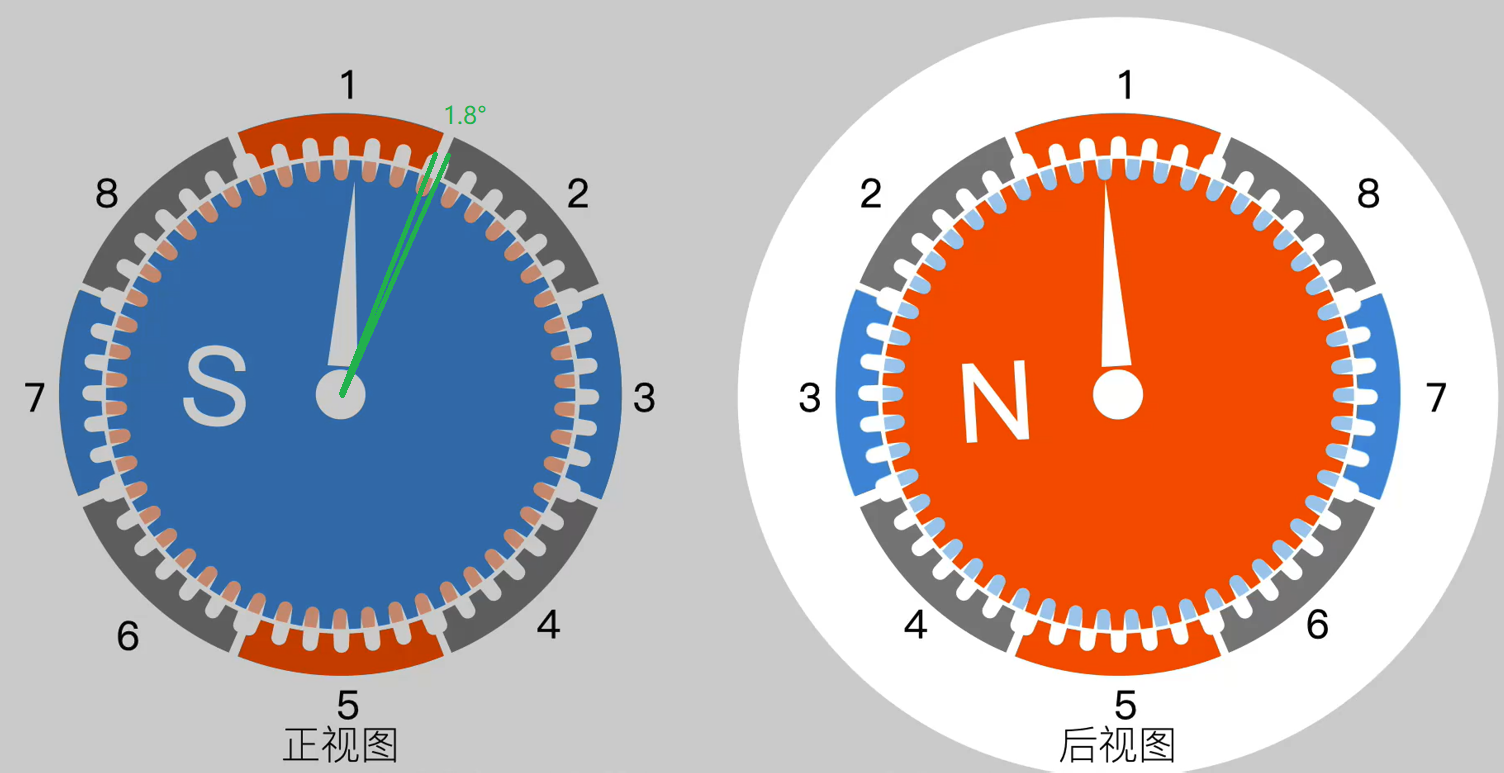
混合式步进电机的转子结构为两个导磁圆盘中间夹着一个永磁圆柱体轴向串在一起,两个导磁圆盘的外圆齿节距相同,其两个圆盘的齿错开1/2齿距安装,转子中圆柱永磁体沿轴向充磁,一段为N,另一端为S。
对一个典型的2相步进电机:
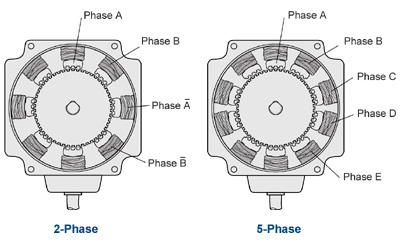
2相与5相
典型情况下,2相与5相步进电机,转子都是50个齿。2相电机,定子有8个磁极;5相电机,定子有10个磁极。
| 特性 | 2相步进电机 | 5相步进电机 |
|---|---|---|
| 结构 | 简单 | 复杂 |
| 成本 | 较低 | 较高 |
| 步距角 | 1.8度(每步) | 0.72度(每步) |
| 扭矩输出 | 较低 | 较高 |
| 运行平滑度 | 振动较大 | 运行更平滑 |
| 控制电路 | 简单 | 复杂 |
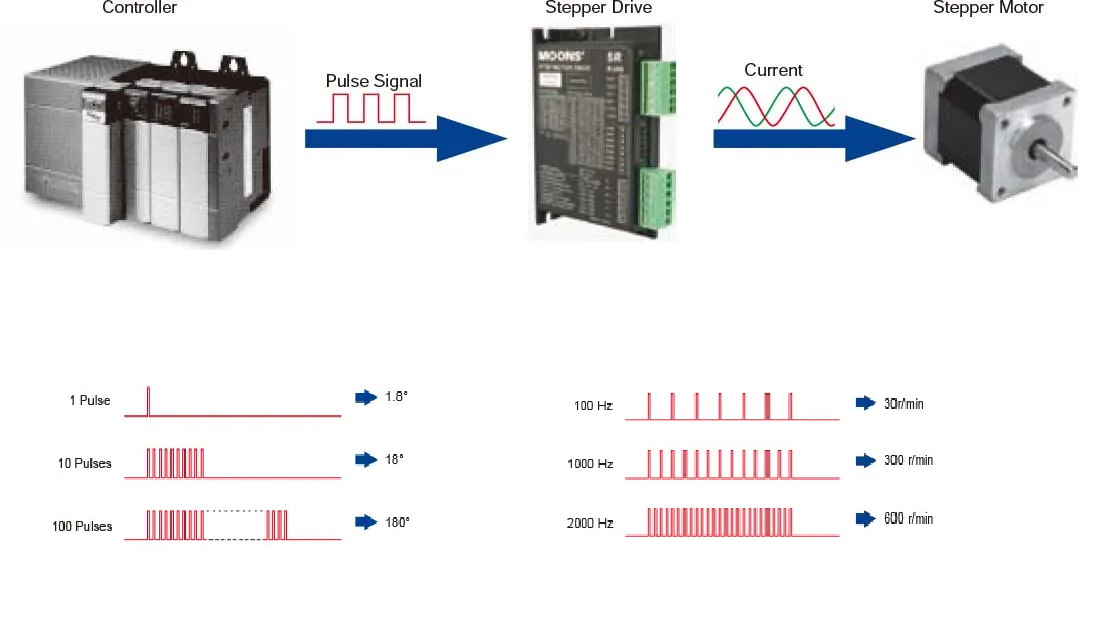
驱动模式
步进电机需要使用运动控制卡、驱动器进行控制。通过脉冲信号的数量和频率可控制位置和速度。
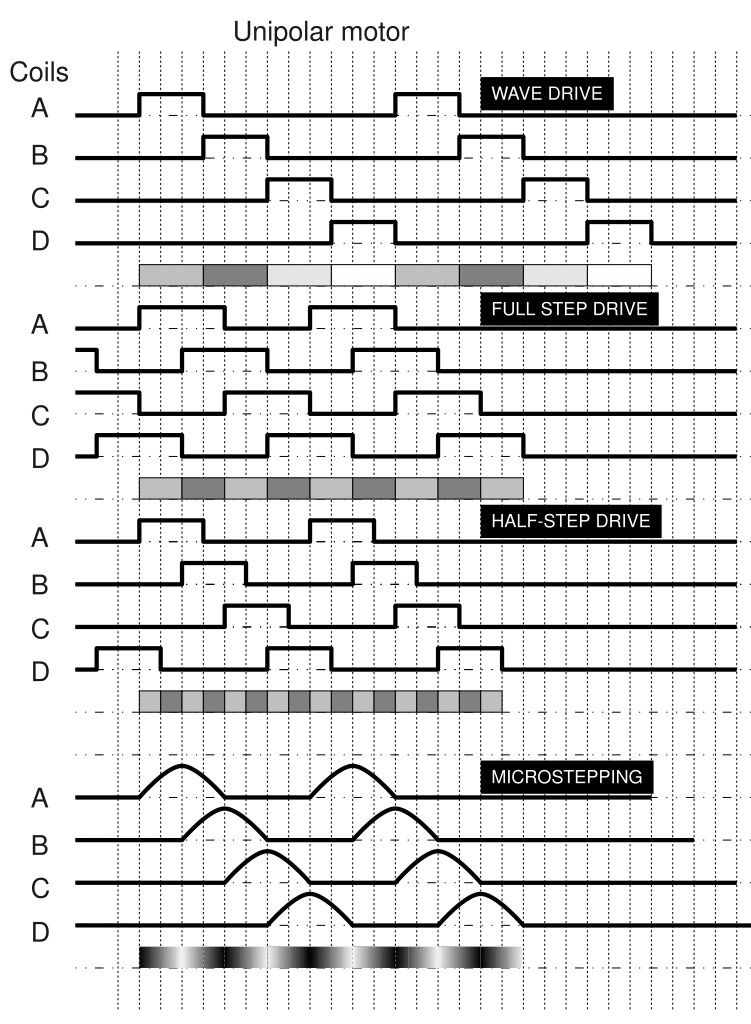
对2相步进电机,驱动模式主要包括:
- 单相驱动(Wave Drive):每次只通电一个线圈。简单但扭矩较低。
- 两相驱动(Full Step):同时通电两个线圈。提供更高的扭矩。
- 半步驱动(Half Step):交替通电一个或两个线圈。提高分辨率,运行更平滑。
- 微步驱动(Microstep):将电流分为更小的步进。实现更高的精度和平滑度。
参考
- https://en.wikipedia.org/wiki/Stepper_motor
- https://www.moonsindustries.com/article/basic-structure-and-operating-principle-of-stepper-motor
- https://www.orientalmotor.com/stepper-motors/technology/2-phase-vs-5-phase-stepper-motors.html
- https://www.orientalmotor.com/stepper-motors/technology/stepper-motor-basics.html
- https://haokan.baidu.com/v?pd=wisenatural&vid=14005628814363889303