电机(Electric Motor)是一种将电能转换成机械能的设备,也被称为马达,是Motor的音译。
一些术语?
- 定子(Stator):固定部分,包含绕组。
- 转子(Rotor):旋转部分,连接负载。
- 转矩(Torque):旋转力。
- 转速(Speed):旋转速度,以RPM表示。
- 反馈(Feedback):监控电机状态的信号。
- 编码器(Encoder):提供位置或速度反馈的传感器。
- 闭环控制(Closed-loop Control):使用反馈调整输出。
- 开环控制(Open-loop Control):无反馈的控制方式。
- 驱动器(Driver):控制电机运行的设备。
- PWM(脉宽调制):控制速度和转矩的技术。
- 额定电压(Rated Voltage):设计运行电压。
- 额定电流(Rated Current):额定负载下的电流。
- 额定功率(Rated Power):最大输出功率。
- 启动转矩(Starting Torque):启动时的转矩。
- 转差(Slip):转子转速与同步转速的差异。
- 惯量(Inertia):抵抗加速或减速的性质。
- 电枢(Armature):产生电磁力的部分。
- 堵转电流(Stall Current):转子阻止转动时的电流。
- 换向器(Commutator):反转电流方向的装置。
- ...
缩写
- PMSM:permanent-magnet synchronous motor
- BLDC:brushless DC electric motor
- VFD:Variable-frequency drive
- FOC:Field-oriented control
- DTC:Direct torque control
- MPC:Model predictive control
- SVPWM:Space Vector Pulse Width Modulation
- PI:Proportional-integral
分类?
电机在生活中无处不在,种类繁多... 查查资料,简单整理一下
直流电机、交流电机
- 直流电机(DC motor):直流电驱动的电机。常说的直流电机指代有刷电机(Brushed DC electric motor)。
- 交流电机(AC motor):交流电驱动的电机。交流电可以控制电流和磁场方向,可以不用电刷。
广义的直流电机,可以包括:
| 特性 | 直流有刷电机 | 直流无刷电机 | 开关磁阻电机 |
|---|---|---|---|
| 结构 | 有电刷和换向器 | 无电刷,电子换向 | 简单结构,无电刷 |
| 控制 | 简单 | 复杂,需要控制器 | 复杂,需要控制器 |
| 维护 | 需定期更换电刷 | 低维护 | 低维护 |
| 效率 | 较低 | 高 | 中等 |
| 噪音 | 中等 | 低 | 较大 |
| 转子 | 缠绕线圈 | 永磁体 | 无磁体(软磁材料) |
| 定子 | 永磁体或线圈 | 缠绕线圈 | 缠绕线圈 |
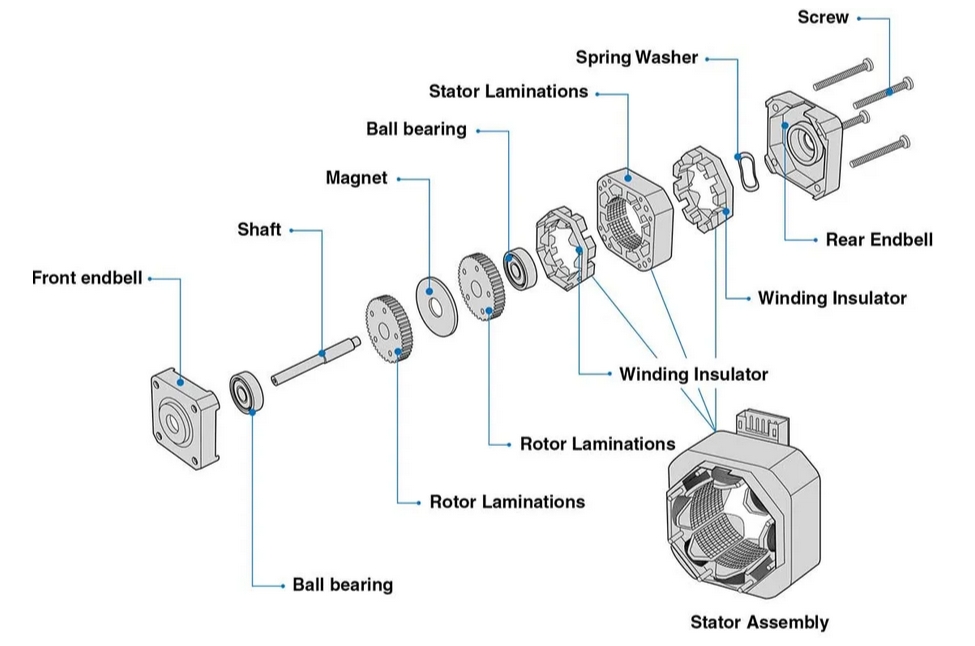
步进电机(stepper motor、step motor)是直流无刷电机的一种。
步进电机
步进电机采用开回路(open-loop)处理,不依赖出传感器或编码器,不需要位置检出和速度检出的回馈,可以脉冲信号进行运动。
步进电机有三种,混合式比较常见。
| 特性 | 永磁步进电机(PM) | 反应式步进电机(VR) | 混合式步进电机(HB) |
|---|---|---|---|
| 特点 | 使用永磁体,步距角较大 | 无永久磁场,依靠磁阻变化 | 结合永磁和反应式优点,精度高 |
| 转子 | 永磁体 | 软铁材料 | 永磁体与软铁组合 |
| 定子 | 缠绕线圈 | 缠绕线圈 | 缠绕线圈 |
| 精度 | 中等 | 较低 | 高 |
| 扭矩 | 较低 | 较低 | 较高 |
| 复杂性 | 简单 | 简单 | 复杂 |
| 应用 | 低成本、简单应用 | 精度较低,适合基本定位 | 高精度、高性能应用 |
混合式步进电机有2相、3相、5相。其中2相电机步距角1.8°。
脉冲数决定了旋转角度,脉冲频率决定了旋转速度。
同步电机、异步电机(感应电机)
同步电机(Synchronous Motor)和异步电机(Induction Motor)都是交流电机。它们都使用交流电源来运行,但在结构和工作原理上有所不同。
| 特性 | 同步电机 | 异步电机(感应电机) |
|---|---|---|
| 转速 | 与电源频率同步 | 低于电源频率 |
| 效率 | 高 | 略低 |
| 结构 | 需要外部励磁(永磁或电枢) | 无需外部励磁 |
| 启动 | 较复杂 | 简单 |
| 转子 | 永磁体或励磁绕组 | 鼠笼式或绕线式 |
| 定子 | 缠绕线圈 | 缠绕线圈 |
单相电机、三相电机
| 特性 | 单相电机 | 三相电机 |
|---|---|---|
| 电源类型 | 单相交流 | 三相交流 |
| 结构 | 简单 | 复杂 |
| 启动扭矩 | 低,需要启动装置 | 高,不需启动装置 |
| 效率 | 较低 | 高 |
| 定子 | 单相绕组 | 三相绕组 |
| 转子 | 鼠笼式 | 鼠笼式或绕线式 |
根据转子结构不同,三相电机有:鼠笼式电机(Squirrel Cage Motor)和 绕线式(Wound Rotor Motor)
| 特性 | 鼠笼式电机 | 绕线式电机 |
|---|---|---|
| 结构 | 转子由导条和短路环组成 | 转子有绕组,连接滑环 |
| 维护 | 维护方便,无需电刷 | 需要滑环和电刷维护 |
| 启动特性 | 启动电流大,转矩低 | 启动转矩高,可调电阻 |
| 复杂性 | 结构简单 | 结构较复杂 |

伺服电机
伺服电机(Servomotor、Servo)不是特定类别的电机,尽管“伺服电机”这一术语通常用于指适用于闭环控制系统的电机。伺服电机是一个电机系统,它包含电机、传感器和控制器,使伺服电机能够实现精确的闭环控制。
编码器的使用是伺服电机的关键特征之一,但并非所有伺服电机都一定内置编码器,某些系统可能采用外部传感器。
提到伺服电机,经常遇到一个名词:舵机。
舵机
“舵机” 其实是一个俗称,是玩航模、船模的人起的名字,因为这种电机常被用于舵面控制。舵机其实就是一个低端一点的伺服电机系统。舵机可以分为模拟舵机和数字舵机。
舵机内部包含:一个小型直流电机,电位计,和一个控制电路。电机通过齿轮与控制轮相连,工作时,传入电信号,电机旋转时,电位计的电阻会发生变化,控制电路通过电阻变化来精确调节转动的角度,当输出轴角度位置恰好处于需要控制的位置时,电机停止转动。
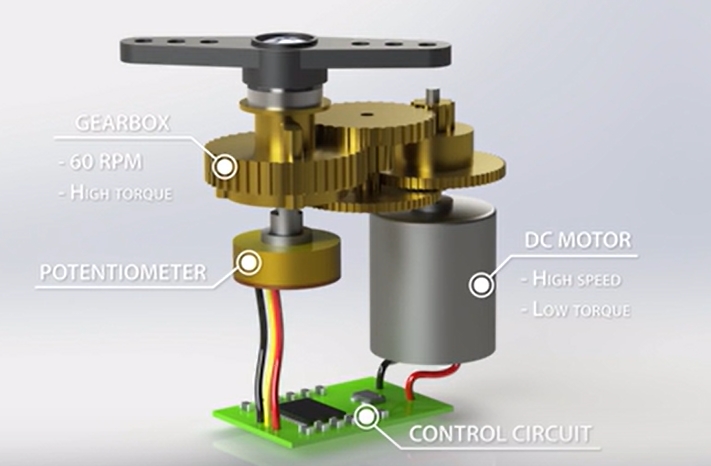
舵机通常3根线:电源线,底线,控制信号线。如果控制信号线通过PWM进行控制,通过脉冲宽度(占空比)控制角度位置,脉冲宽度的变化变化控制运动速度。
永磁电机、励磁电机、感应电机
根据转子磁场产生方式和结构不同?
- 永磁电机(Permanent Magnet Motor):使用永久磁体。
- 励磁电机(Electrically Excited Motor):通过电流在绕组中产生磁场。
- 感应电机(Induction Motor):通过电磁感应产生磁场。
直线电机、旋转电机
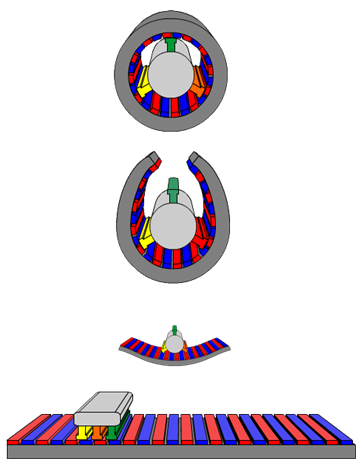
直线电机,也叫做线性电机(linear motor)是一种将电能直接转换成直线运动机械能而不需要任何中间转换机构的传动装置。不同于旋转电机,它不是产生扭矩(旋转),而是沿其长度产生直线力。它可以看成是一台旋转电机按径向剖开,并展成平面而成。
直线电机种类基本与旋转电机对应
| 直线电机种类 | 对应旋转电机种类 |
|---|---|
| 直线感应电机(LIM) | 感应电机(IM) |
| 直线同步电机(LSM) | 同步电机(SM) |
| 直线开关磁阻电机(LSRM) | 开关磁阻电机(SRM) |
| 直线步进电机(LSM) | 步进电机(SM) |
压电马达(压电陶瓷电机)
压电马达(piezoelectric motor、piezo motor)是一种利用压电效应驱动的电机,通过电压改变压电材料的形状来产生运动。
压电马达大致可以分为三大类:
- 共振马达(超声波驱动器),resonance-motors (ultrasonic drives)
- 惯性马达(粘滑原理),inertia-motors (stick-slip principle)
- 压电步行驱动器。piezo-walk drives
共振马达
通过高频电压在压电材料中产生超声波振动,利用共振效应放大振动幅度,增加驱动力。
共振马达分为:行波马达和驻波马达。
惯性马达
惯性马达是一种利用压电效应和惯性原理进行运动的电机,通过快速的膨胀和收缩产生摩擦力,导致负载移动。
压电步行马达
通过电压驱动压电材料,使其产生微小的机械运动。利用多个压电元件的协调动作,模拟步行方式推动负载。
参考
- https://en.wikipedia.org/wiki/Electric_motor
- https://www.moonsindustries.com/article/basic-structure-and-operating-principle-of-stepper-motor
- https://en.wikipedia.org/wiki/Piezoelectric_motor
- https://www.pi-usa.us/en/tech-blog/overview-of-different-piezo-motor-design-principles
- https://www.163.com/dy/article/HEC3ISH505380ADU.html